THE FOLDED SHELL
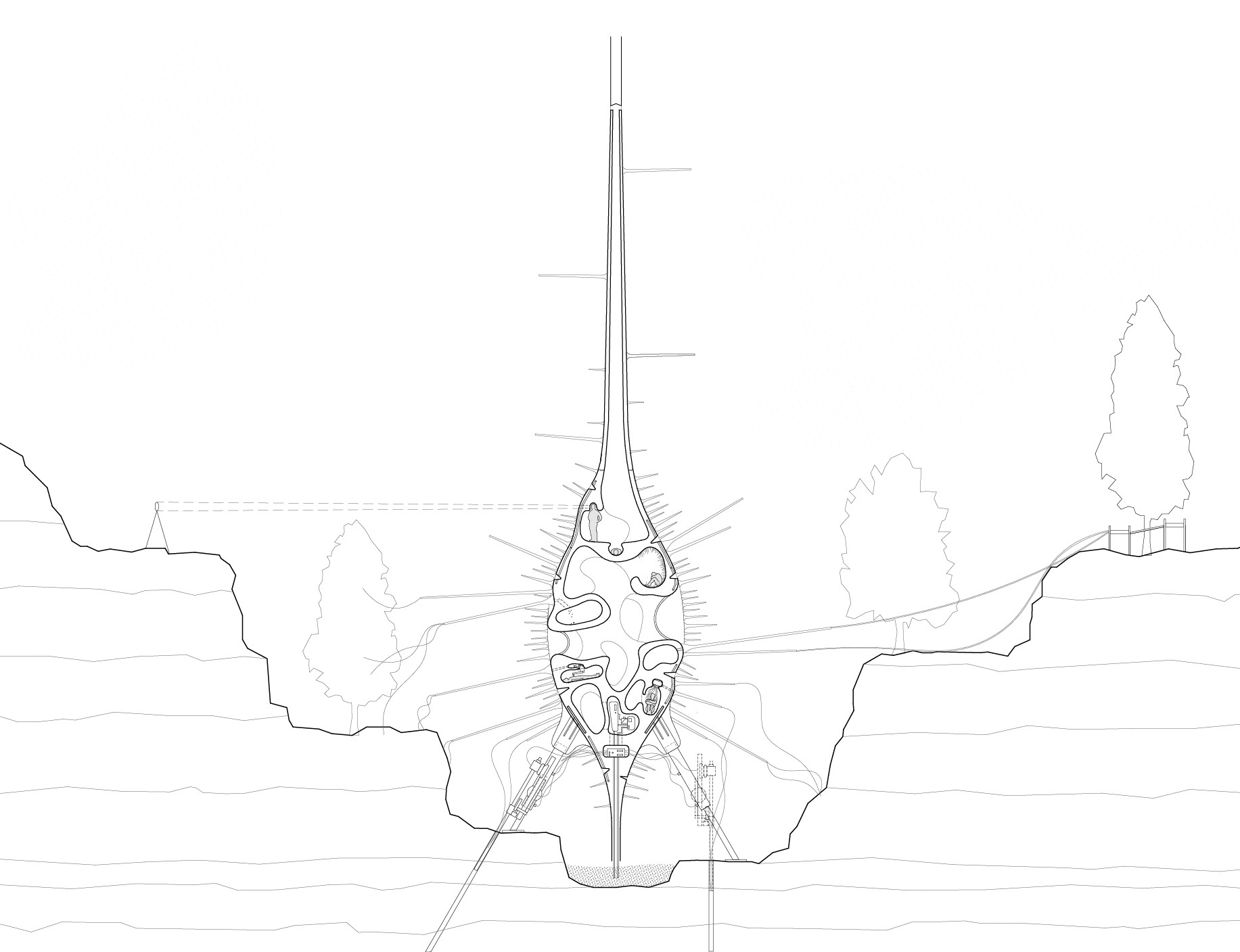
The theoretical framework of Desiring machines, the Body without Organs and The Fold results in a continuous folded shell with encapsulated humans connected to the environment through sensing spikes. The centralized space distributes the sensing devices to the environment through the spikes. The shell gets its specific height and shape from the distribution of atmospheric sensing devices into the atmosphere and its high antenna. Moreover, the shell folds to form spaces of habitation and slowly encapsulates the human body.
Structure
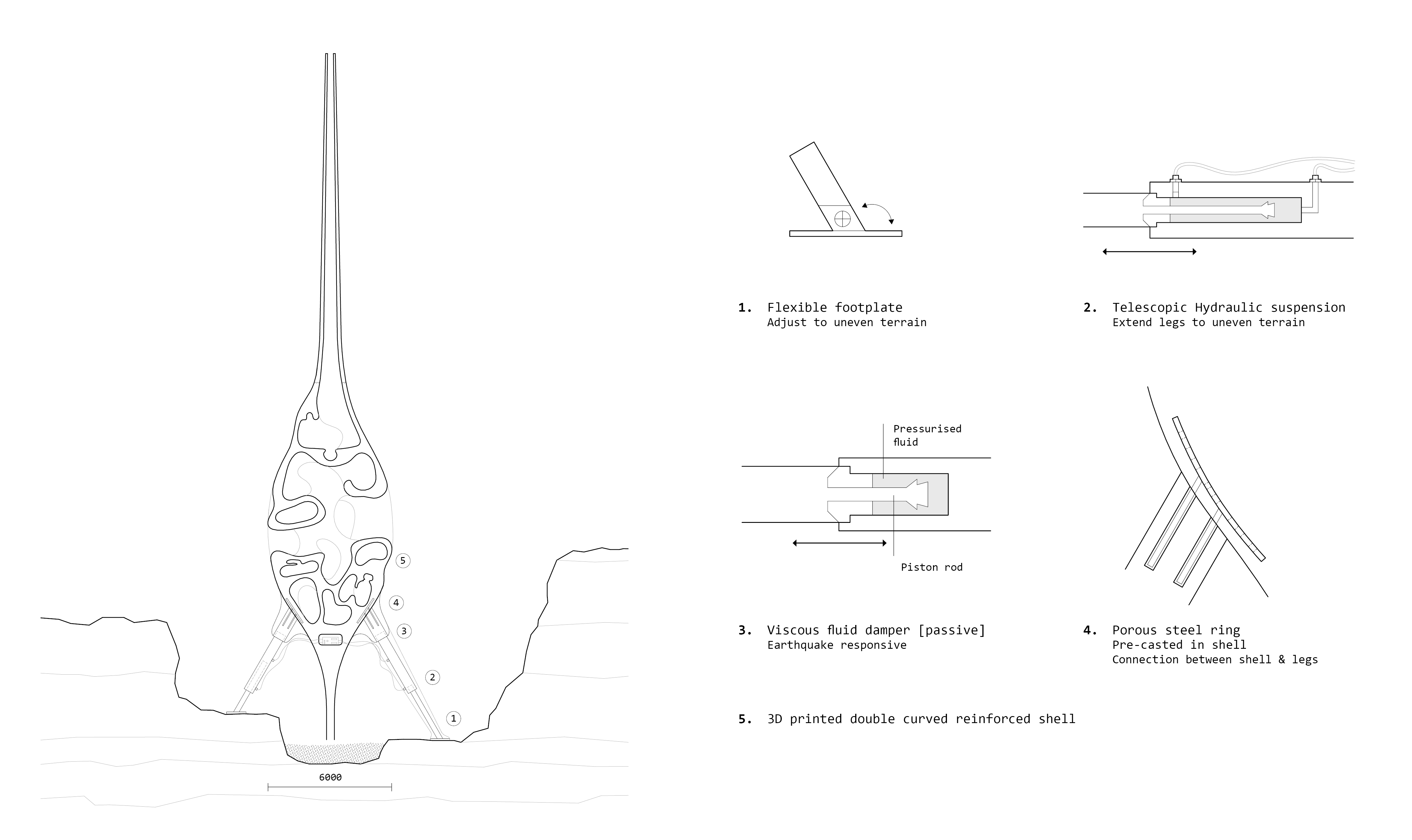
The folded shell consists out of 5 main structural components:
1. A flexibile footplate adjusts the project to uneven terrain.
2. An active telescopic Hydraulic suspension system as knees extend the legs to uneven terrain. Hydraulic pressure allows the legs to extend and contract.
3. Passive viscous fluid dampers as hips allow the project to vibrate and respond to earthquakes. This system consists out of a piston rod in a pressurized fluid which allow the legs to move in and out of the hips.
4. A pre-casted porous steel ring in the shell allows the prefab shell to be connected to the legs on-site.
5. A 3D printed double curved reinforced shell. The double curved shell structure printed as one is capable of developing compressive, tensile and shear stress. The weight of the shell structure denies it from tipping over. The shell is reinforced with fiberglass during its printing process since the material is highly corrosive towards traditional steel.
Fabrication & Assembly
The folded shell is fabricated through additive manufacturing. Additive manufacturing (3D printing) is capable of printing complex forms and has little waste material compared to traditional methods. The specific technique used in this project is D-shape binder jetting. With binder jetting, a printhead carefully deposits a liquid binding material onto a thin layer of powder particles to solidify the material. This process is repeated layer by layer until the object is formed. The dimensions of the project are exactly the maximum of the industrial sized printer; 6000 x 6000 x 2000mm. The used material is a magnesium based composite. Its aggregate sand, binder magnesium based cement and catalyst water are all locally sourced which makes it a relatively sustainable production technique. The material is 30% lighter than concrete and produces far less energy and Co2. As specified earlier the material is reinforced with fiberglass in the printing mixture since the material is highly corrosive towards traditional steel.
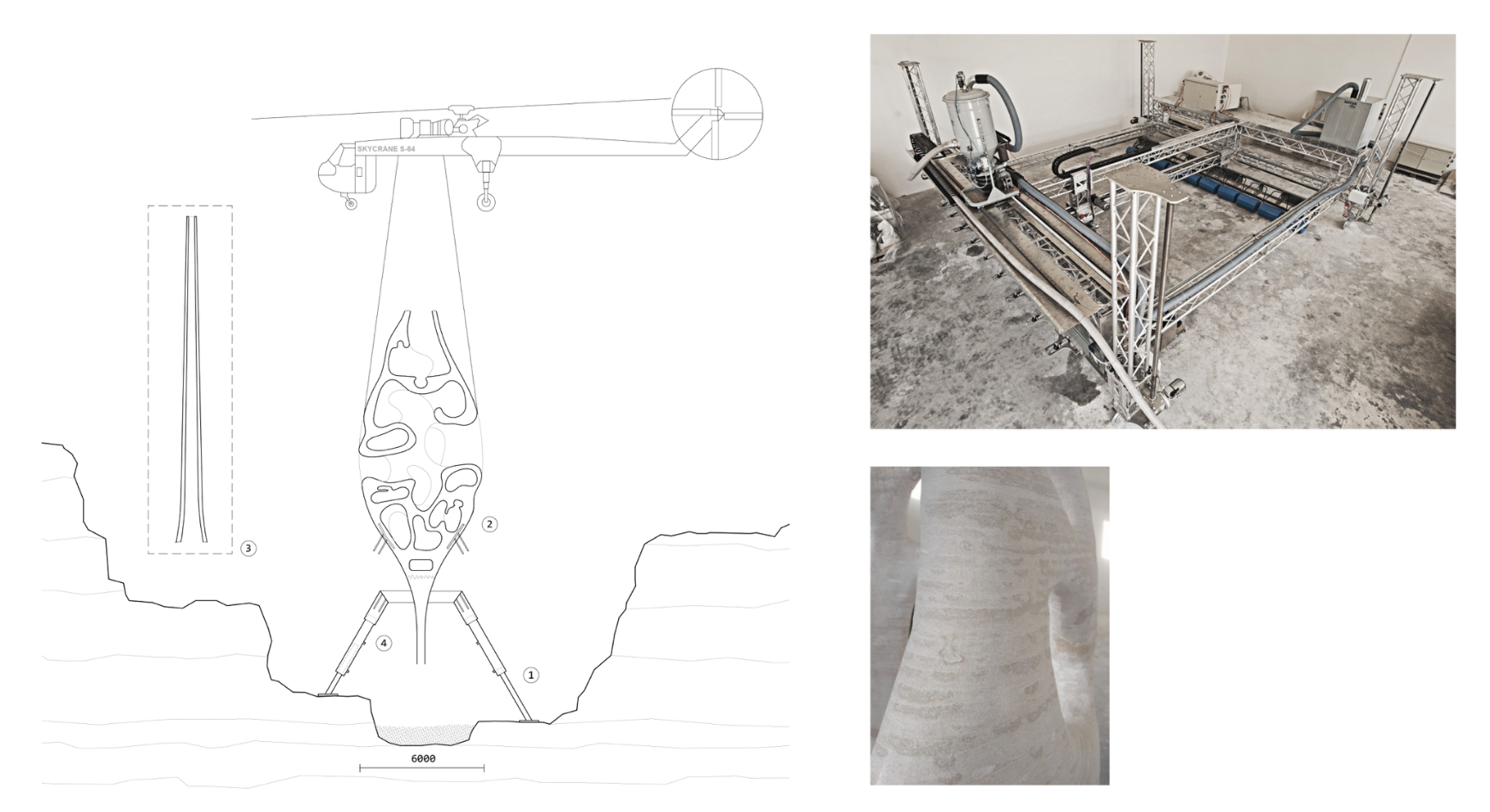
The process of assembly on-site consists out of 4 main parts:
1 The flexible legs are put into place with a temporary steel ring to maintain stability.
2 The pre-fabricated shell is transported to the remote site with a skycrane helicopter. From here, the shell with its steel ring and connection pins are lowered and connected onto the legs.
3 Due to printing size limitations and transportation efficiency, the upper part is printed as a separate piece and glued onto the main shell on-site.
4 The temporary steel ring around the legs is removed since the project is now stable through the connection of shell and legs.

Drills
The project has multiple drills for sampling and installing sensors into the Earth. These drills are armed onto the legs to form a stable base. The chosen drilling method is sonic drilling which has the least impact on the Critical Zone compared to other drilling methods since it produces little waste and requires no fluid. Sonic Drilling uses high frequency resonant energy produced by a hydraulic motor to vibrate the string of the drill bit. The drills can rotate to drill both vertically and diagonally. The boreholes are used for the sampling of earth, groundwater monitoring, and the installing of piezometers and seismic refraction sensors.